Horizon 2020のResults Pack – 欧州の製造業における先進的イノベーション – 人間とロボットの協調

欧州プロジェクトの情報サービスであるCORDISが、2021年12月に人工知能の産業応用に関する研究成果をまとめた小冊子 (Artificial intelligence and industry: Advanced innovation for European manufacturing) を発行した。Results Packはテーマ領域ごとに、関連する欧州の研究プロジェクトをセレクトして概要と成果をまとめたパンフレットであり、これまでに80冊余が発行されている。本記事では、人工知能とロボティクスの製造業への応用を中心にいくつかの技術トピックをピックアップする。
14のプロジェクトを紹介
このResults Packでは、AI(人工知能)の産業応用に関連する、Horizon 2020 の14のプロジェクトを紹介している。
| プロジェクト名 | コアコンセプト | コーディネーター組織 | プロジェクトサマリー | プロジェクトWebサイト |
| An.Dy – Advancing Anticipatory Behaviors in Dyadic Human-Robot Collaboration | 人間の行動を予測するロボット | Italian Institute of Technology in Italy | https://cordis.europa.eu/project/id/731540 | https://andy-project.eu/ |
| CoLLaboratE – Co-production CeLL performing Human-Robot Collaborative AssEmbly | 合成皮膚を持った産業用ロボット | Aristotle University of Thessaloniki in Greece | https://cordis.europa.eu/project/id/820767 | https://collaborate-project.eu/ |
| COMPUSAPIEN – Computing Server Architecture with Joint Power and Cooling Integration at the Nanoscale | 低エネルギーでより大きなコンピューティングパワーを | Swiss Federal Institute of Technology Lausanne in Switzerland | https://cordis.europa.eu/project/id/725657 | https://www.epfl.ch/labs/esl/research/thermal-aware/compusapien/ |
| EU-Japan.AI – Advancing Collaboration and Exchange of Knowledge Between the EU and Japan for AI-Driven Innovation in Manufacturing | 欧州と日本のAI知識のギャップを埋める | MINDS & SPARKS in Austria | https://cordis.europa.eu/project/id/957339 | https://project.eu-japan.ai/ |
| HEPHAESTUS – Highly automatEd PHysical Achievements and PerformancES using cable roboTs Unique Systems | 建設分野の自律型ロボット | Tecnalia Research & Innovation in Spain | https://cordis.europa.eu/project/id/732513 | http://www.hephaestus-project.eu/ |
| IMAGINE – Robots Understanding Their Actions by Imagining Their Effects | ハードウェアを分解するインテリジェントロボット | University of Innsbruck in Austria | https://cordis.europa.eu/project/id/731761 | https://imagine-h2020.eu/index.php |
| LOGISTAR – Enhanced data management techniques for real time logistics planning and scheduling | グローバルサプライチェーンの将来を保証するAI | University of Deusto in Spain | https://cordis.europa.eu/project/id/769142 | https://logistar-project.eu/ |
| PROGRAMS – PROGnostics based Reliability Analysis for Maintenance Scheduling | 予知保全を製造現場に | University of Patras in Greece | https://cordis.europa.eu/project/id/767287 | https://www.programs-project.eu/ |
| ResiBots – Robots with animal-like resilience | 動物にインスパイアされた自律ロボット | Inria in France | https://cordis.europa.eu/project/id/637972 | https://www.resibots.eu/ |
| ROBINS – Robotics Technology for Inspection of Ships | ロボットが船舶の検査を支援 | RINA Services in Italy | https://cordis.europa.eu/project/id/779776 | https://www.robins-project.eu/ |
| ROSSINI – RObot enhanced SenSing, INtelligence and actuation to Improve job quality in manufacturing | 協調ロボットを製造現場に導入して安全と効率を両立 | Datalogic in Italy | https://cordis.europa.eu/project/id/818087 | https://www.rossini-project.com/ |
| SERENA – VerSatilE plug-and-play platform enabling remote pREdictive mainteNAnce | 予知保全のためのAIプラットフォーム | Comau in Italy | https://cordis.europa.eu/project/id/767561 | https://serena-project.eu/ |
| Smarter Vision Micro – The most accurate 3D sensor in the world | 小型のリアルタイム3Dイメージセンサの開発 | Ladimo in Finland | https://cordis.europa.eu/project/id/880709 | https://www.ladimo.fi/ |
| THOMAS – Mobile dual arm robotic workers with embedded cognition for hybrid and dynamically reconfigurable manufacturing systems | 製造現場を動き回る2本腕のロボット | University of Patras in Greece | https://cordis.europa.eu/project/id/723616 | http://thomas-project.eu/ |
Industry 5.0のコンセプト
インダストリー5.0の中心となる考え方は、人間とロボットやスマートマシンが協調して働くことにより、コスト効率と生産性の最適なバランスを実現しようというものである。製造業の現場において、ロボットは自動車工場での溶接や塗装、倉庫での重い材料の積み下ろしなど、危険で単純な作業を行ってきた。インダストリー5.0ではロボットがさらにスマートになることにより、人間とロボットの知性を統合して高度な作業を行うことを目指している。Results Packではこの考え方に則ったテーマがいくつか紹介されている。
人間の動きを予測するロボット
An.Dy プロジェクトではロボットと人間の協調作業において、ロボットが人間の行動予測をすることにより、より安全な環境を実現することを目指している。人間が身につけたウェアラブル・デバイスから動き、心拍、血圧、体温などの諸データを収集し、それらを機械学習することにより人間の行動予測を可能にする。ロボットは人間の行動を予測しながら自分の動きを制御し、安全で効率の良い良い共同作業を実現する。プロジェクトでは、ワーカー用のスーツをインテリジェント作業服のプロトタイプとして開発した。商品化が望まれている。
合成皮膚を持ち製造現場で人間と協調して働くロボット
CoLLaboratEプロジェクトでも人間と協調して働くことを前提にしたロボットの開発を目指している。ユースシーンとしては、一つの組み立てセルの中で人間とロボットが一緒に組み立て作業を行うことなどを想定している。例えば、重い物体を協力して持つ場合にはロボットがより多くの力を出せるように作業したり、人間とぶつからないような安全性も考慮されている。ロボットの合成皮膚も開発されていて、物体との接触の検出だけでなく、接触の種類を識別できる機能を持っている。小ロット生産を行う中小企業の支援も期待されており、今後運用環境でさらなる開発とテストを行なっていく予定である。

有害なハードウェアの分解とリサイクルを行うロボット
IMAGINEプロジェクトは、電子ゴミ (e-Waste) の問題解決を視野に、電気電子機器を分解し、有害物質や貴金属や有用な原材料を分類・リサイクルするロボットを開発することを目的としている。分解作業は人間がやるには複雑で危険であり、その結果、現状ではリサイクルされるのは40%未満に過ぎない。このロボットの特徴は、今まで見たことのないデバイスも分解することができることである。機械学習と物理シミュレーションにより、デバイスをどうやって分解すればいいかを判断し、実行することができる。以下に、ハードディスクを分解するデモの動画を掲載する。
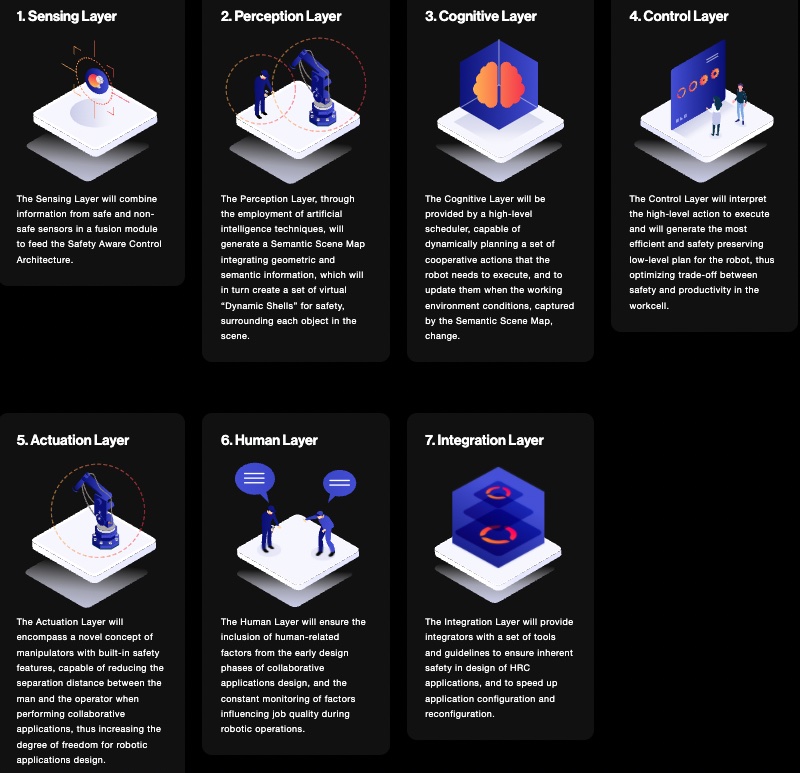
7層のヒューマン・ロボット・インテグレーションのプラットフォーム・アーキテクチャ
ROSSINI プロジェクトは、これまでオフショアで行われていた製造が欧州に戻ってきている現状を踏まえ、人間とロボットが協調して働くためのプラットフォームを7つのレイヤーで定義するアーキテクチャを提案している。実際に3つのユースケースを構築し、家電のワールプール、エレベーターのシンドラー、食品パッケージのIMAでテストを行なっている。
製造現場に予知保全をもたらす
PROGRAMS プロジェクトの目的は、モデルベースの予知技術の開発である。FMECA(故障モード・影響および致命度解析)とPRM(プロセス信頼性モデリング)のアプローチを統合した予測手法と、リソース管理のツールや情報共有ツールも開発している。コントローラーとセンサーデータ、メンテナンスレポート、オペレーターエクスペリエンス、物理的特性など、すべての工場レベルから情報を抽出し、人工知能ベースのアルゴリズムを使用して、メンテナンスの最適なスケジュールを決定する。

建設分野の自律型ロボット
HEPHAESTUS プロジェクトは、ビルのファサードの建築現場で使用するケーブル駆動のロボットを試作している。建設分野のデジタル化は遅れており、現在でもほとんどをマニュアルワークに頼っている。そして、事故が多い、工期がかかる、品質が不安定などの問題などを抱えている。本プロジェクトでは、ビルの表面を自由自在に移動し、諸作業を行うロボットを試作した。1000kgまでの重量物を持ち上げることができ、工期の20%削減や事故の減少などの成果をあげている。
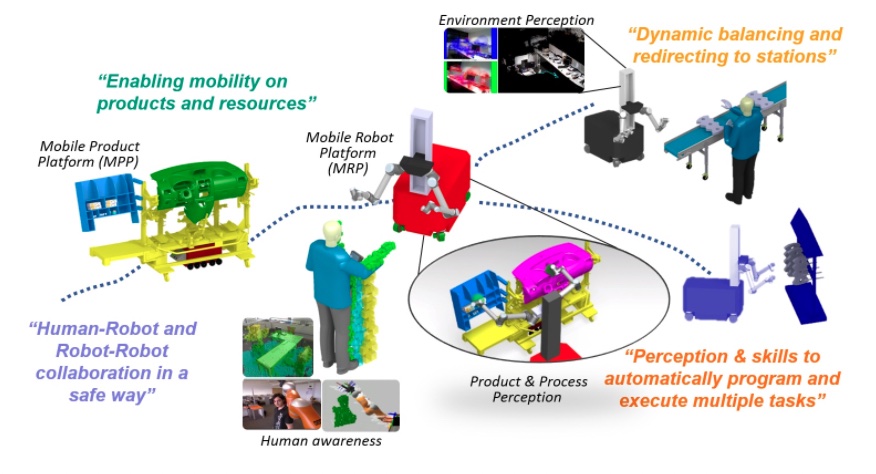
動的に再構成可能な製造システムのための双腕ロボット
THOMAS プロジェクトは再構成可能な工場を実現することを目的として、移動式双腕ロボットを開発した。そして、工場のフロアをデジタル化して、人間のオペレータからロボット、部品、工程に至るまで、物理的な工場のデジタルツインを作成した。これは動的モデルであり、諸センシング技術を活用して現場の状況をリアルタイムで把握する。ロボットは最も危険で過酷な作業を代行し、人間のアシスタントとして働く。これにより、工場の安全性が高まるだけでなく、人間はロボットのプログラミングなど、高度な作業に集中することができる。